
Réalisation de chargeur de batteries sans fil PIC 16F877
Chapitre IV : réalisation
Introduction :
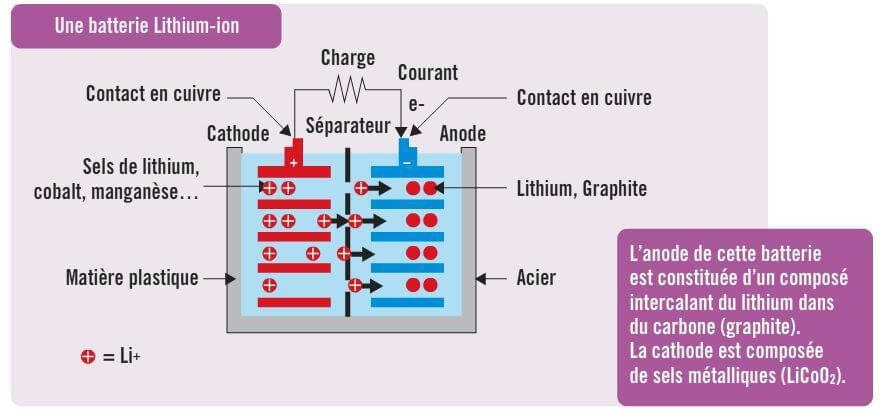
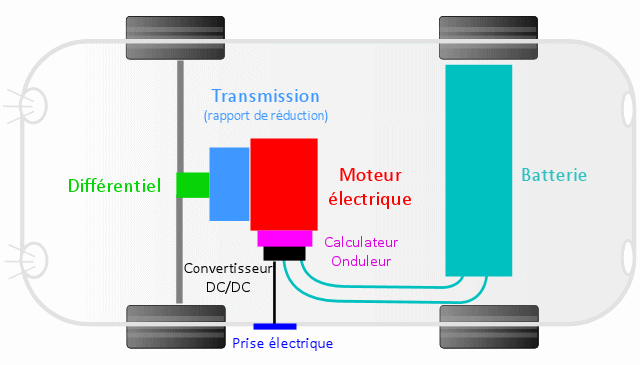
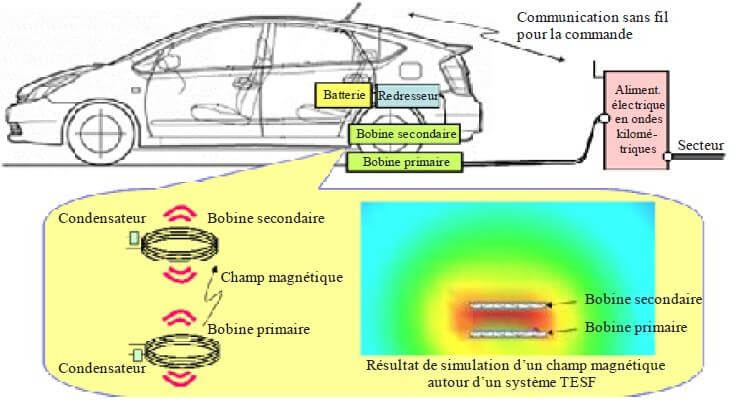
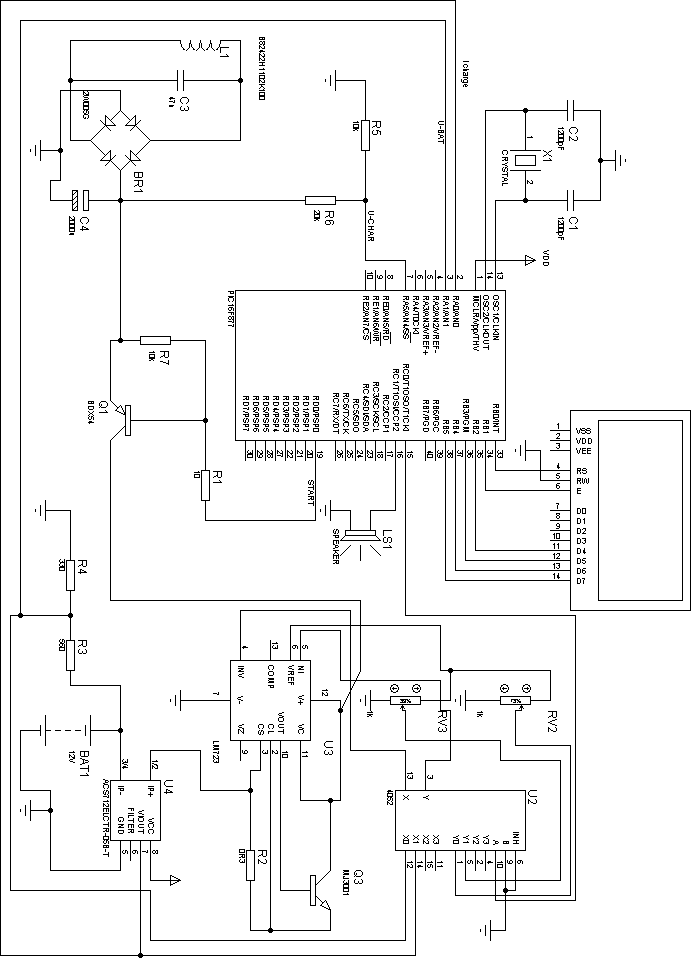
Le projet réalisé est un chargeur rapide sans fil destiné pour les voitures électriques et/ou hybrides, Basé sur le fameux microcontrôleur Pic 16F877 qui commande et contrôle la charge des batteries lors du chargement. Un afficheur LCD pour l’indication des valeurs des courants et tensions et signalant tout événement.
L’application a été réalisée avec le langage C en utilisant le compilateur MikroC
I – le pic 16f877 de Microchip :
L’avantage de microcontrôleur pic c’est un composant bon marché de plus on peut trouver des compilateurs free download qui fonctionnent parfaitement. pour le 16 f877 est un microcontrôleur 8 bits CMOS en boîtier DIP 40 broches.
Il dispose de deux Timers/compteur 8 bits avec pré-scaler 8 bits, un Timer / compteur 16 bits avec pré-scaler, un Timer Watchdog (WDT) avec son propre oscillateur RC sur puce pour un fonctionnement fiable et deux Modules capture / compare PWM
I-2 Caractéristiques de pic 16F877 :
• 35 instructions
• Mémoire programme de 14 Ko
• Fréquence d’utilisation de DC à 20MHz
• Mémoire EEPROM donnée de 256 octets et RAM 368 octets
• 14 interruptions et 3 Timers
• Interfaces MSSP, USART, PSP, SPI et I2C
• Circuit de détection de baisse de Brownout, pour Reset (BOR)
• 33 broches d’E/S
• Large plage de tension d’utilisation de 4V à 5.5V
• Convertisseur analogique-numérique 10 bits multicanal
• Gamme de température d’utilisation de -40°C à 85°C
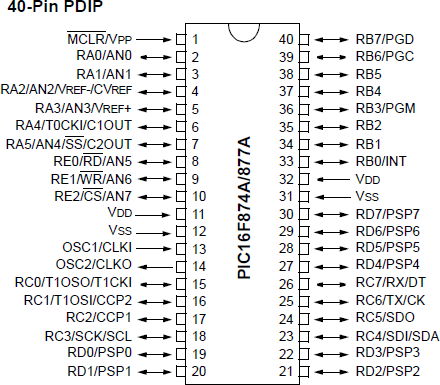
Figure 4_1 : pin diagram Pic16F877
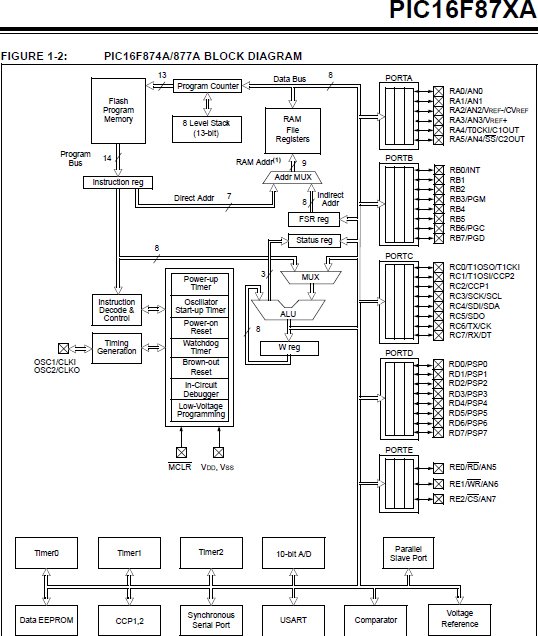
Figure 4_2 : Block diagram PIC 16F877
I-3 Conversion Analogique numérique ADC :
Ce processus est réalisé avec un convertisseur interne du microcontrôleur. Ce module est intégré dans la plupart des microcontrôleurs de moyenne et haute gamme.
La conversion implémentée sur les PIC a une résolution de 10 bits, ce qui permet un nombre allant de 0 à 1023, proportionnel aux valeurs de référence, qui sont par défaut 0 volts et 5 volts.
Cela signifie que si une entrée analogique a une tension de 0 volt, le résultat est à 0, et si la tension est de 5 volts, le résultat de la conversion est de 1023, de la même façon si la tension est de 2,5 volts, le résultat est de 512.
En fonction de la complexité d’un microcontrôleur, le PIC peut avoir jusqu’à huit entrées du signal analogique. Cependant, il est à noter que le microcontrôleur a un seul module interne de conversion.
Les 4 registres utilisés par le module convertisseur A/D sont :